 智能制造網APP
智能制造網APP
 智能制造網手機站
智能制造網手機站
 智能制造網小程序
智能制造網小程序
 智能制造網官微
智能制造網官微
 智能制造網服務號
智能制造網服務號










走在大街上,偶爾能看到掛在墻上清洗建筑外墻的“蜘蛛人”們,不禁要為他們的安全擔憂。清洗建筑外墻玻璃這個看似不復雜又危險的工作,多年以來卻始終沒有被機器代替。智能外墻清洗機器人ispider或許能夠改變這一情況。它由廈門樸蜂科技歷時9年研制,目前樣機的功能論證已經完成,正進行量產前準備。
ispider能夠模仿“蜘蛛人”的清洗流程,對大多數建筑外墻進行自動清洗。它體積和一個中學生接近,由設置在樓頂的可移動卷揚機構,通過鋼絲繩牽引,對大樓外墻面進行清洗。這樣一個人掛著水桶,拴根繩子,拿著抹布和刮水器就能完成的工作看似簡單,然而樸蜂科技創始人張華龍告訴36氪,實際要遠比想象中困難的多,這也是他們歷時9年才完成研制的主要原因。具體里面的困難主要有幾個方面:
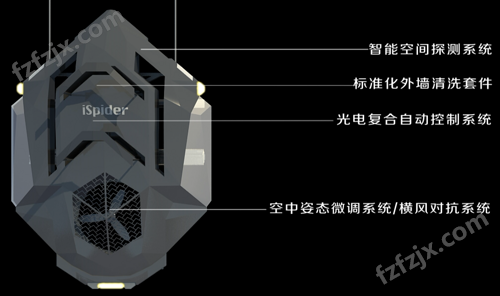
首先,就是要能夠識別不同的墻面,采取不同的清洗方案。為此,ipsider使用了機器視覺技術,在室外光照、溫度和識別背景高度復雜的情形下,通過特殊的算法及高速并行處理方式,對墻面的材質變化進行識別,提供不同的清洗方案。同時對外墻框架線條的變化進行精細尺寸測量,確保清洗機械臂對高低不同的墻面能夠進行全面地類似人工流程的清洗。

其次,還要保證姿態穩定。機器人在空中工作時,即有來自各個方向的風或其它干擾,又有工作過程中動作反作用力產生的姿態偏移,ispider的控制系統需要要在這些條件下,保證系統平穩地工作。因此ispider采用了類似無人機控系統的控制算法,對姿態和位置進行控制。張華龍也因此把ispider稱作“半飛行器”。
ispider的控制系統由10個CPU組成神經元系統,以200HZ的反應速度,管理觸覺,姿態,方向,速度,風壓,識別等50多個傳感器,以及40多個執行清洗和姿態控制的微型數字電機。在控制系統的保證下,ispider可以像壁虎一樣牢靠地吸附在墻面工作,也能像飛行器一樣在強風中保持自身的姿態和安全。
此外,還要能夠攀爬和越障。建筑外墻很多時候會有各種障礙,如窗臺窗框等,機器人需要能夠識別并越過這些障礙。ispider依靠毛刷和刮雨器工作臂交替伸縮落地,實現了攀爬并同時清洗窗框窗臺等障礙物。與飛行器類似的姿態控制系統讓ispider可以以飛行的方式跨過障礙。攀爬和越障使得ispider可以清洗目前90%以上的建筑外墻面。個別特殊墻面,樸蜂采用定制配件的方式解決。

最后,要小型和輕量化。現場人工可輕易搬動的小型輕量化系統是實用性的首要選擇。為了實現小型和輕量化,樸蜂使用了多方面的技術:
參照航空飛行器進行結構設計,使用“翼盒”結構,盡可能減輕重量。
為了避免附帶龐大的支持管線,使用了儲能/重量比高的磷酸鋰鐵電池,可以使機器連續工作180米。
合計30余個電機,全部采用了體積小的數字化稀土永磁無刷航空電機,電機的轉速可以無級調節,由CPU根據工況實時控制。
使用碳纖維與環氧樹脂等復合材料,在保證強度前提下減輕重量,一次性整體熱壓成型水箱、殼體等部件。
內置循環水系統,避免了附帶水管線,也可以降低耗水量。
通過以上多種技術,ispider最終工作車的不帶水重量在40公斤以內,人工可搬運。
以上問題都是在研發過程中逐漸遇到和解決的。一開始他們以為1年半就能研發成功,后來不斷遇到各種技術問題,多次想要放棄,后來又逐個突破,直到現在,研發基本完成,各項功能都完成驗證。期間控制代碼的編寫和完善足足歷時9年。
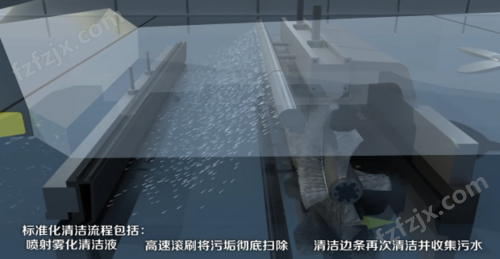
具體到清潔效果,張華龍表示,清潔效果比人工要好。ispider采用螺旋槳推動清洗機器人,并保持一定的壓力,使其可伸縮的毛刷工作臂與待清洗面接觸,由內置驅動裝置驅動毛刷輥子高速旋轉擊打清洗面,配合噴水軟化和沖洗污垢。這樣即保證清洗力度,又可以提高移動速度,提高效率。
清潔速度方面,張華龍告訴36氪,ispider基于自學習技術,前后速度有所不同。次時,ispider會對建筑的外墻面情況進行學習,并通過GPRS與后臺通信,清洗速度和人差不多,之后的清洗,由于機器已經熟悉了墻面情況,速度可以達到人的10倍。
設計完成后,他們并不打算量產出售設備,而是采用兩步走方式進行商業運作。步在廈門成立清洗服務公司,使用ispider提供清洗服務,并可以針對不同的樓定制配件,跑通整套業務流程。第二步在其它城市采用加盟合作的方式進行擴展。據張華龍計算,量產的ispider成本在20多萬,洗3、4棟樓就可以收回成本。

雖然功能驗證完成,但作為工業產品,要實際投入應用,還需要經過各種可靠性測試,并綜合成本,性能等因素完成量產版產品定型。目前版本的ispider在一棟4層樓上進行了近一年半的測試,設置了不同障礙修正完善了控制系統,也在一棟20層的樓上進行了運行測試,但后續還需要進行多輪試制和測試,才能最終量產定型。
目前正在融資,用于量產前產品測試研制和產品制造














